



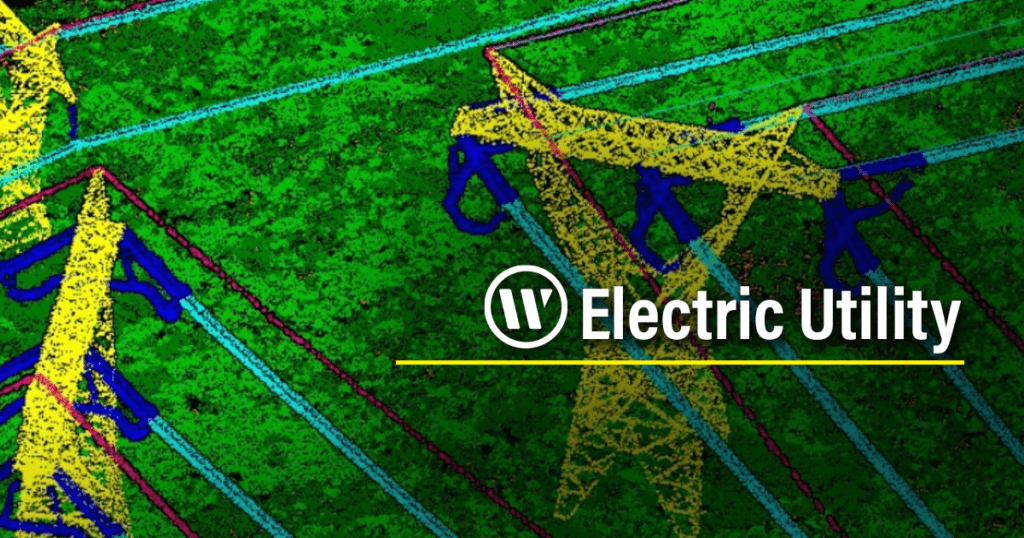




Next Level Data Collection: WGI’s Geospatial Team Combines Technologies to Capture Data
WGI’s geospatial team recently utilized vehicle-mounted mobile lidar, boat-based lidar, and sonar to collect data for the partial rehabilitation of a bridge.

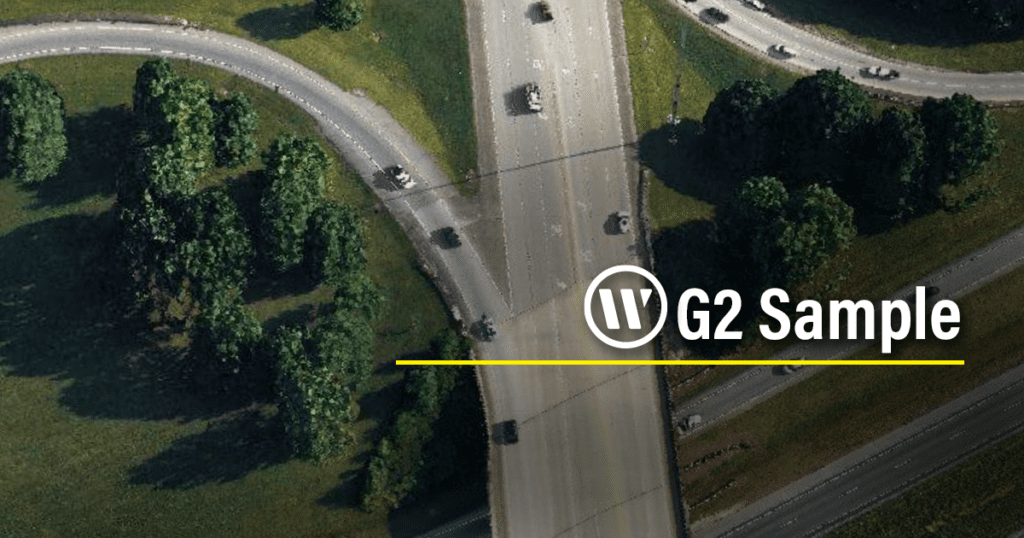
Better and Faster Survey Data Through Technology: Get Geospatial Already
Discover how WGI’s land surveying expertise allows us to bring true added-value to our clients with higher-quality data at a lower cost.

2020 And Beyond: WGI is Innovating The Future of Geospatial
In the WGI Geospatial Division, we are innovators. While anyone can purchase the latest technology such as UAS and lidar systems, we pride ourselves on the unique ways we leverage technology to provide better deliverables for our clients. Here’s what we’re working on…
